|
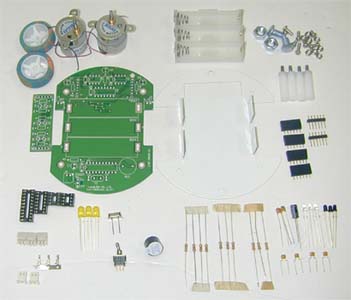
1. Check
your partlist in your kit.
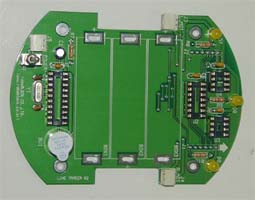
2.
Let's solder
①IC Socket U1,U2,U3,U4 ②
condecer 104pF C4,C5,C6,C7 ③ Cystal Y1
④
Capacitors 30pF C2,C3
3.
Let's solder ①resistor 1K ohm R7, ② capacitor
10uF C1, ③2P connector Male J5,
④toggle
S/W SW, ⑤ buzzer BU1(check capacitor, buzzer
polarity )

그림같이 납땜을 하면된다.
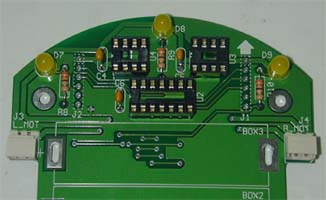
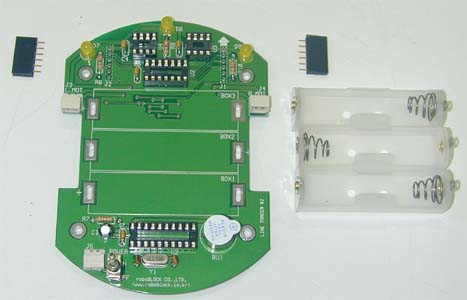
4. Let's
solder ①LED D7,D8,D9, ②resistor 330ohm R8,R9,R10 ③2P
connector male J3,J4.
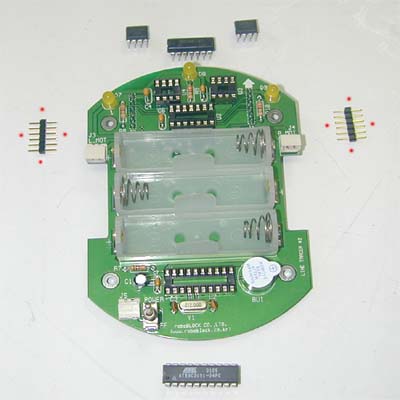
5.
Let's solder ①6P header pin female(J1,J2), ②battery
socket BOX1,BOX2,BOX3



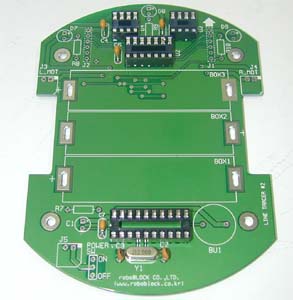
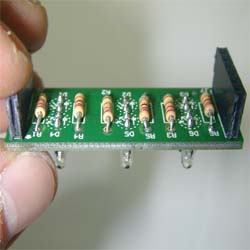
6. Check a sensor board or partlist. solder ①resistor
1.2Mohm(
R1,R2,R3) ,
22omh(R4,R5,R6)
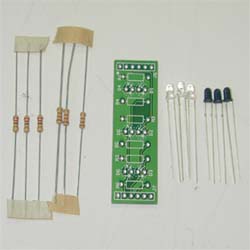

7.
Let's
solder
①6P header pin female(J6,J7) ②Ir-sensor ST-7L(D1,D2,D3)
EL-8L(D4,D5,D6)
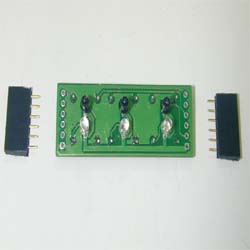


8.
Connect sensor board with main board using
2 header pin male(red spots).
put IC chip in sockets.
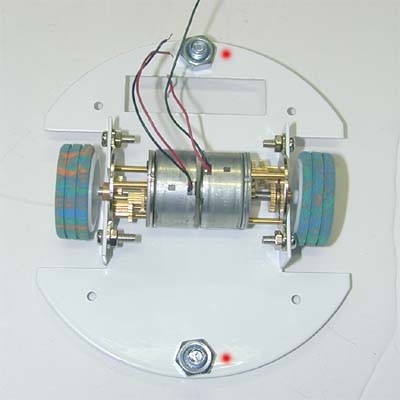
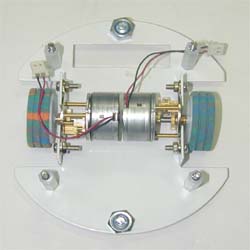
9.
Assemble DC motor with bolt or nuts and ball caster(red
spot), wheels. 다.
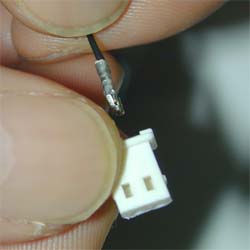
10.
Assemble terminal as shown



11.
Assemble
supporter and nuts.



12.
Assemble
this robot with body base, main board, sensor board
as shown




13.
How to works
Place linetracer
on the black line of Track Board. the robot is thus
informed of the place or is the line to follow
The
moving direction of it can be varied by the program
, Make your program by your self ....모두가
|