|
“My
first robot !!
LINE TRACER robo-Z“
“The
Easiest and Cheapest Robot in the World“
Robo-Z
is a 'simple' robot able to follow a traced line
on the ground.
The
line must be 'dark-color' on 'a clear' support.
Robo-Z is equipped with 2 high-luminant-LEDs
transmitting
on each side associanted with 2 CDS-cell receiving.
These high-luminant-led lights
give
you better racing feelings especially at night.
One LED manages the left side. the other right side.
Each transmitting high-luminant light on the ground.
As
the quantity of light reflected by the dark line
differs from that reflected by the ground, the robot
is
thus informed of the place or is the line to follow.
Each CDS-cell-sensor controls each motor in order
to ensure the corrections of trajectories necessary
to the follow-up of the line


In this Robo-Z kit, all the required components are included. You do require
soldering equipment to assemble it
Robot-Z
may be the world's cheapest and easiest robot which
explore the world of robotics and can be a starting
point with making of your own robot. You can adjust
the speed of the robot, and can adjust the position
of the sensor to get better results.
Now
follow the instructions to assemble it, and enjoy
yourself.
 
first,
Let's soldering on the PCB.
Check all the required components in your
kit.
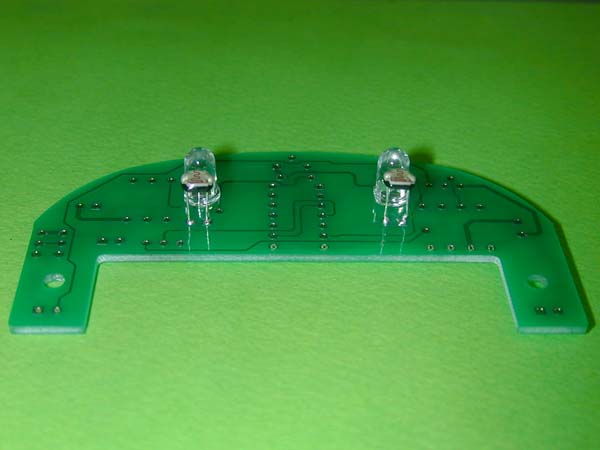
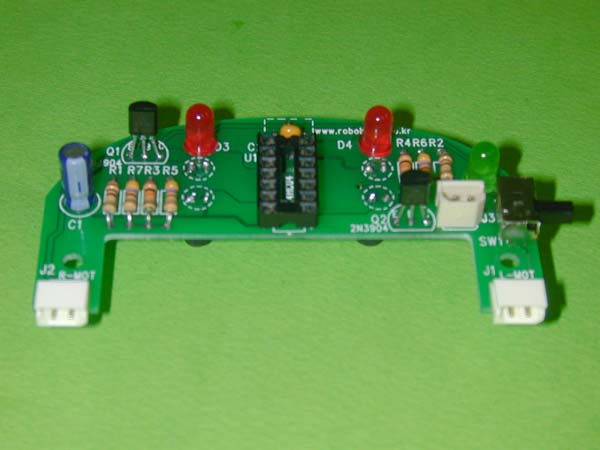
As shown
in [Fig], insert the legs of two high-luminant LEDs
on the PCB to suitable length and mount one LED
on the left side and the other on the right side.
Then rap the LEDs using a peace of spaghetti insulation
tubes so
that each focusing high-luminant light on the ground.
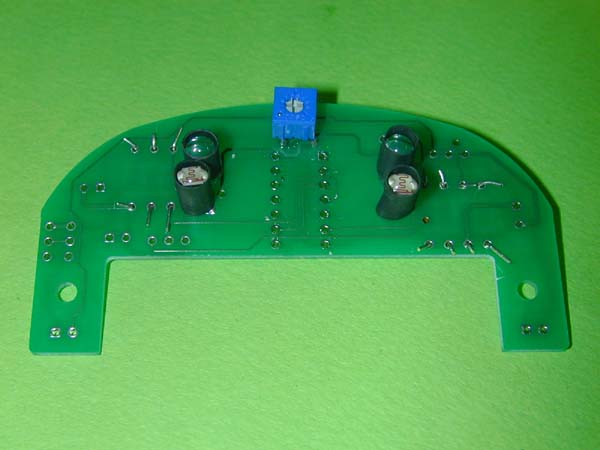
Next, cut the legs of two CDS sensors and mount
one in
CDS1 and the other in CDS2. Then the resister of
each CDS-cell-sensor is effected by the quantity
of light reflected
by the dark line differs from that reflected by
the grounds, the robot is thus informed of the place
or is the
line to follow.
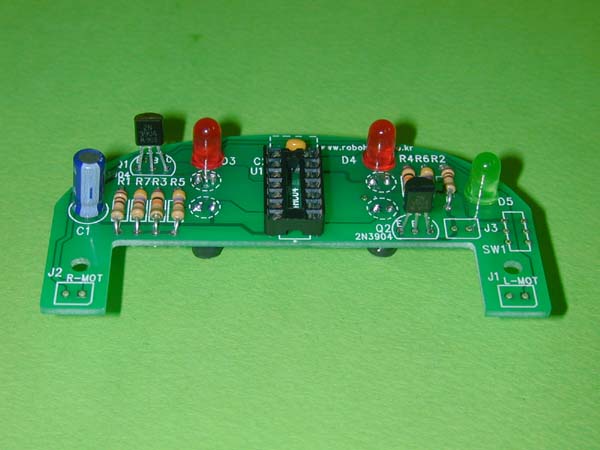
*
step 1: Soldering fixed value resistors on
the PCB top-side
* step 2: Soldering LEDs
on the PCB
* step 3: Soldering Capacitors
on the PCB
* step 4: Soldering a TTL(74HC14)
IC on the PCB top-side
*
step 5: Soldering a Transistor on the PCB
*
step 6: Soldering a Connector on the PCB.
*
step 7: Finally, Putting them together
1.
Place the PCB which you assembled from Step1 to
Step7 into the Robo-Z body
2.
Connect a battery case line to the power connector
J3.
3.
Connect left motor line to J1 and right motor line
to J2 respectively
4.
Cover the top, and place stickers on the surface
of the top cover.

 
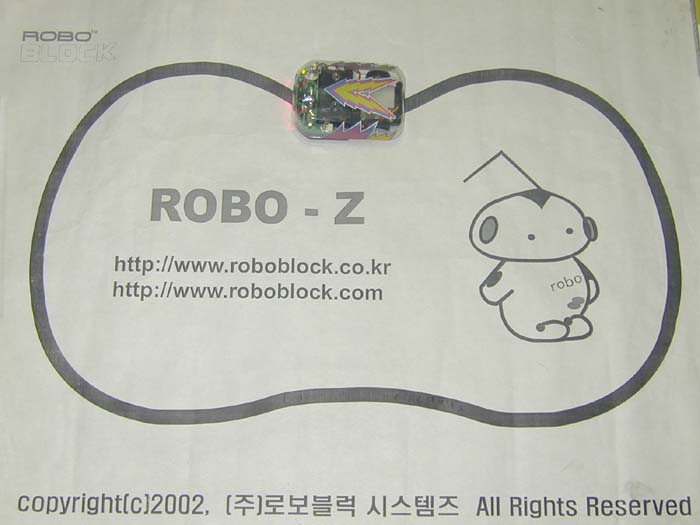
How
it works
Place
Robo-Z on the black line of 'ROBOTRACK' as show
in [Fig]
Then,
each of two, left and right, high-luminant-led transmitting
high-luminant light on the ground. As the quantity
of light
reflected by the dark line differs from that reflected
by the ground, the robot is thus informed of the
place or is the line to follow. Each CDS-cell-sensor controls motors
in order to ensure the corrections of trajectories
necessary to
the follow-up of the line
Thus,
positions of the high-luminant-leds and CDS-cell-sensor
will be effected very much to the right control
of
tracing the dark line. the speed of Robo-Z can be
varied by the resistance value of a 'potentiometer'.
You
can adjust the resistance value of potentiometer
using a small screw driver.
 
|