|
1.
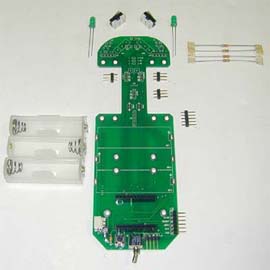
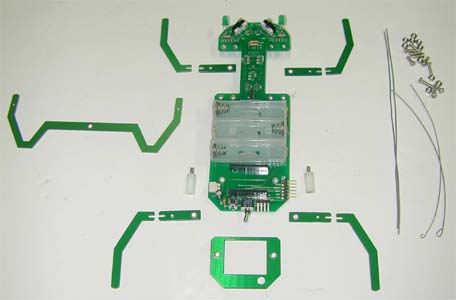
Check the AT90S4433(AVR) board, main board partlist.
.


2. Solder Header
pin female J4, J5, Header pin male J7, J10(J7,10 angle type) toggle
S/W,
push button S/W,
2P connector male, 10uF electrolytic condenser (white vertical line-),
104pF miler
condenser.


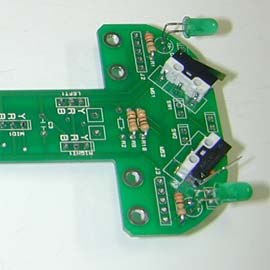
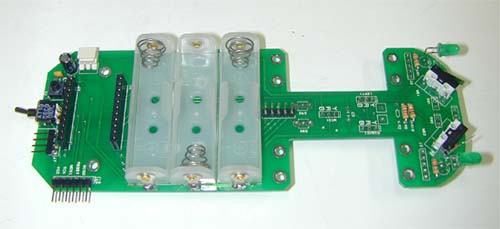
3. Solder the battery case onto BS1,2,3,; the Headerpin male onto J8 ,LEFT1, RIGHT1, MID1;
resistance 330 ohm onto R1,R3 ; resistance 1K ohm onto R9,R10 ; LED onto D3,D4 ; Limit S/W
into MS1,MS2.
Put LEFT1,RIGHT1,MID1 up from the board then solder them.



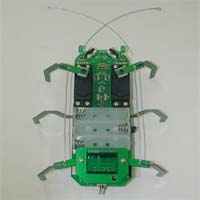
4. Glue the connection and Ant legs. Tape the double-sided tape on the center of
the servo
motor bottom.


5.
Settle the left and right servo motors into the main board with screws and nuts.
And glue the center servo motor. Please consider the location for legs.


6.
Assemble legs into the main board with the components of the servo motor
(
screws and axis link)
  


After the assembling, cut the middle legs to contact a ground. Don't cut them too
short.
Be careful to screw too much because it will walk.
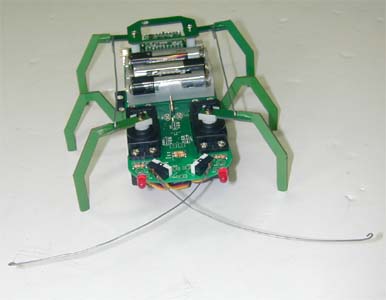
7. Bend the leg connection wires as 115cm from front legs to back legs.

8.
Solder the horns of the ants onto limit S/W and combine it with the leg link wires.
put the AT90S4433 main module in the
base body.



When you solder wires and limit S/W, the soldering paste will be able to help you. Don't forget
that reinforce the soldering part with rapping wires.
10. Be careful the direction of the CPU board to the main board. Combine battery also.
Before power on, release the 3 screws on the servo motor. At the situation, check the
balance of the right and left motor. If the balance is wrong, take off the motor link and
assemble again.
11.
Let's download program to Robot(cpu) using
ISP cable .
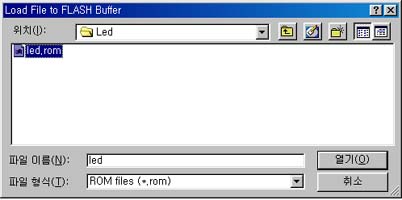
*Download
program to ROBOT(CPU) using ISP cable
1. first, connect isp port of robot to isp
cable as shown in Fig.


2.
after make a CodeVision C program , click
tools->chip Programmer in this program CodeVisionAVR
popup
" Chip Programmer". you can load
your program(xxx.rom) from this directory.

3. after you erase program in this robot,
click "Program" in this software, then
program be
downloaded from
PC to your robot (must be press "reset sw")

4.
when program was downloaded, remove isp cable from
robot, this robot can be walk by himself
try
.....!!!
|